Hallsensorbetätigung
Entscheidungskriterien für die Wahl des richtigen Magneten
|
Schaltertyp gewünschte Schaltcharakteristik Schaltabstand Bewegungsart Abmessungen, Toleranzen, Gewicht |
Temperaturbereich umgebende Materialien Befestigungsmöglichkeiten vorhandener Platz usw. |
Gerne beraten wir Sie bei der Wahl des richtigen Magneten
Funktionsprinzip
Bei den Positionssensoren handelt es sich um Halleffekt - Sensoren. Mit Hilfe eines Dauermagneten kann in Abhängigkeit der magnetischen Flussdichte ein schaltendes oder analoges Ausgangssignal erzeugt werden. Durch die kompakte Bauform können so berührungslos Positionen, Drehzahlen, Zustände, etc... erfasst und ausgewertet werden.
Die magnetisch betätigten Halbleiter- Sensoren können grundsätzlich in drei verschiedene Ausführungen eingeteilt werden:
- Digital
- Analog
- Mit eingebautem Magnet
Zur Betätigung der Sensoren bieten wir mehrere Stab- und Ringmagnete an.
Stabmagnete verschiedener Grösse und Stärke eignen sich insbesondere für Sensoren mit unipolarer Schaltcharakteristik.
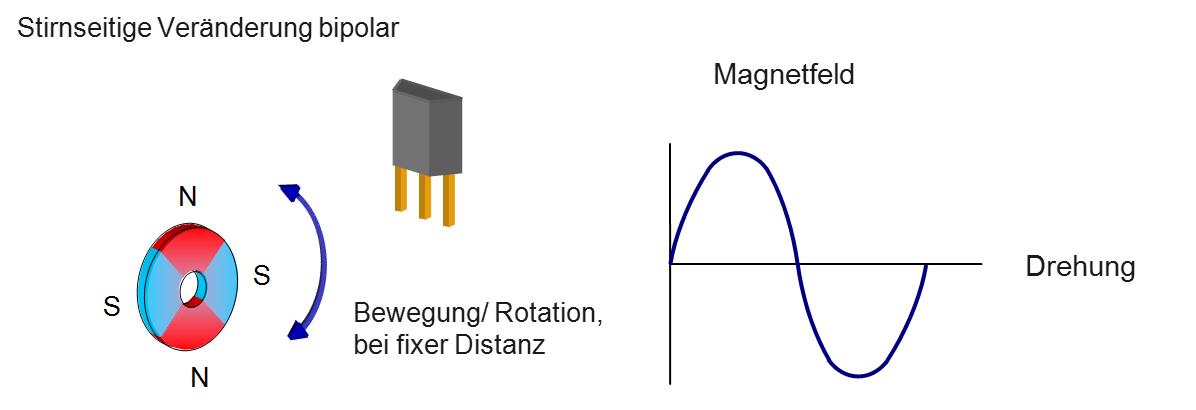
Ringmagnete mit sich auf dem Umfang abwechselnden Nord- und Südpolen passen vor allem zu Sensoren mit bipolaren Schaltverhalten. Bei den Halleffekt- Sensoren wird der Halbleiter- Chip mit einem Strom I gespiesen und lässt senkrecht dazu ein Magnetfeld (B) einwirken. So entsteht im Chip eine Spannung im rechten Winkel zum Feld und zum Strom. Diese Sensoren arbeiten polabhängig.

Wie Eingangs erwähnt, gilt es verschiedenste Kriterien für die Wahl des richtigen Magneten zu berücksichtigen. Lassen sich doch x-mögliche Variationen zusammenstellen.
Leistungsvergleich
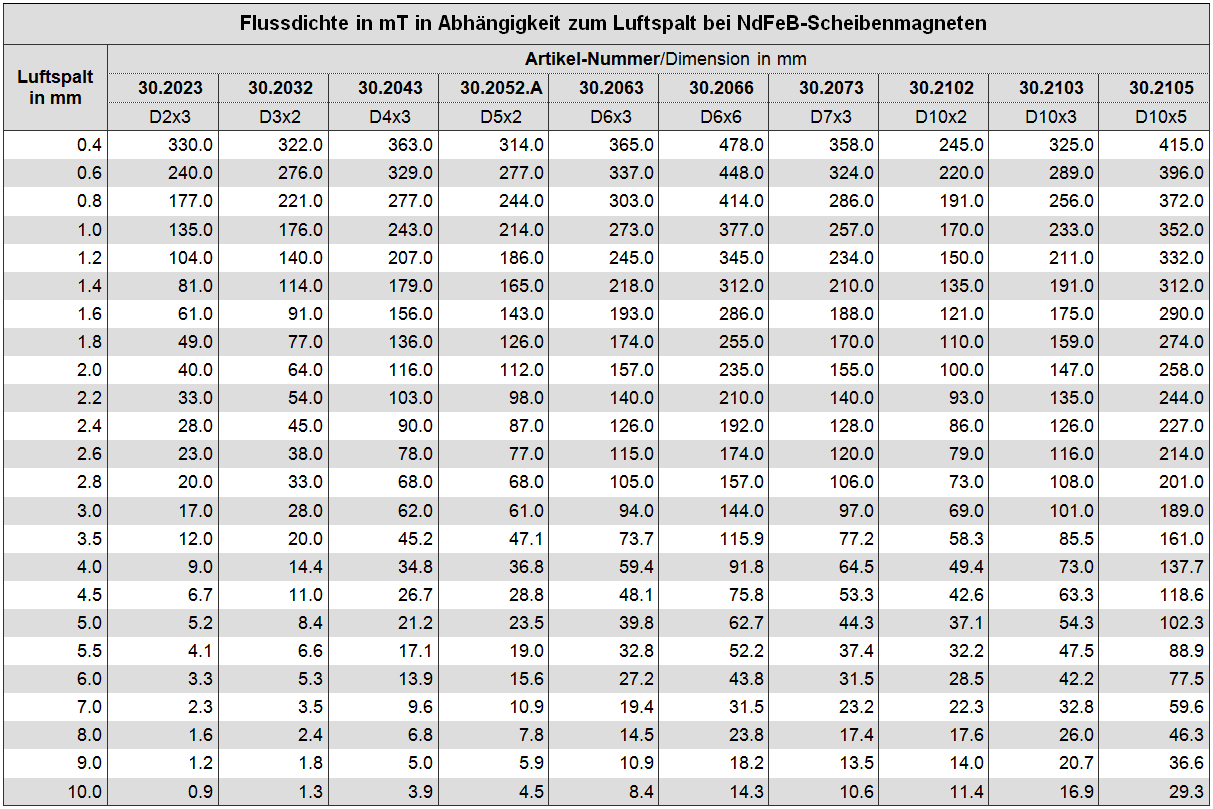
In der folgenden Tabelle wird Ihnen die Wichtigkeit der richtigen Materialwahl dargestellt.

Die Magnete sind so ausgelegt, dass Sie im Abstand von 5 mm von der Polfläche ein Feld von 100 mT erzeugen.
Siehe auch folgende Tabellen mit den Angaben der Flussdichte von Magneten aus Neodym in Abhängigkeit zum Luftspalt.

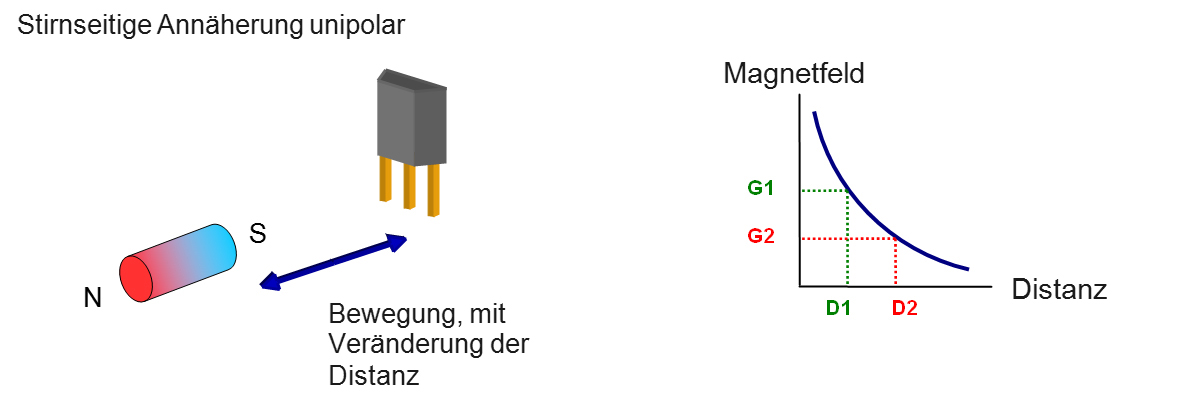
Digitale Sensoren
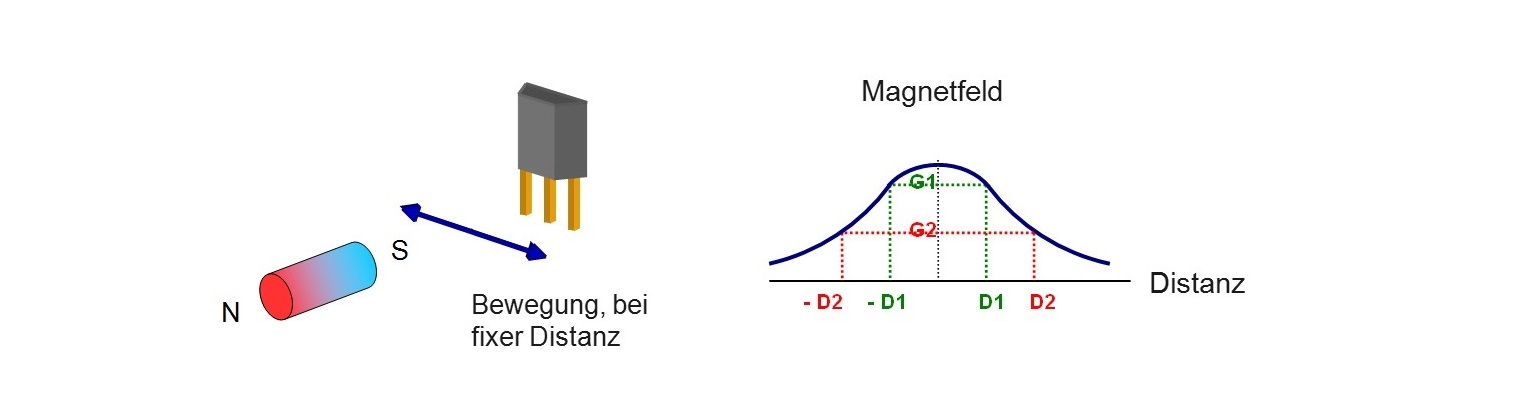
Wird der Magnet bei der stirnseitigen Annäherung zum Sensor geführt, wird er erst bei der Distanz D1 einschalten. Es wird die Magnetstärke G1 benötigt. Wird er wieder wegbewegt, schaltet er erst bei der Distanz D2 aus. Es wird also eine niedrigere Magnetstärke benötigt um den Sensor zu „halten“.
Es können unipolare oder bipolare Magnete zur Anwendung kommen.
Einige Anwenderbeispiele:
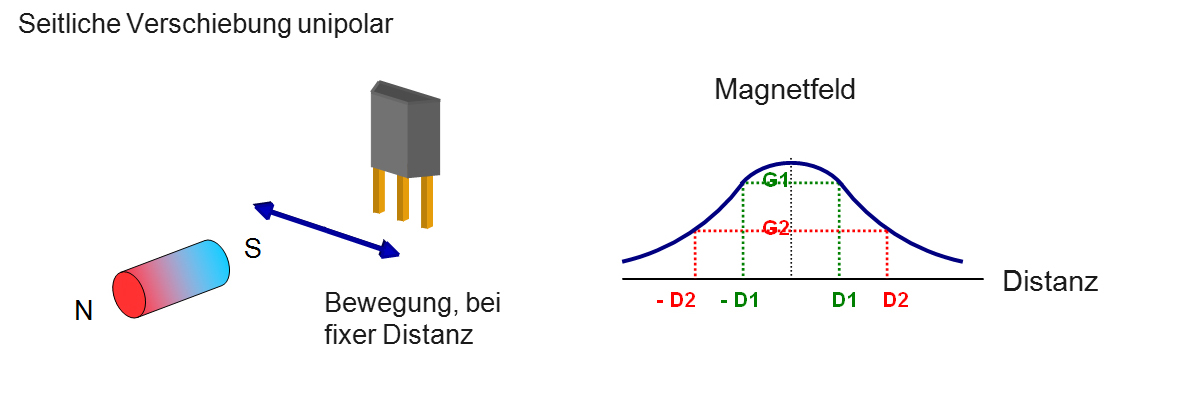
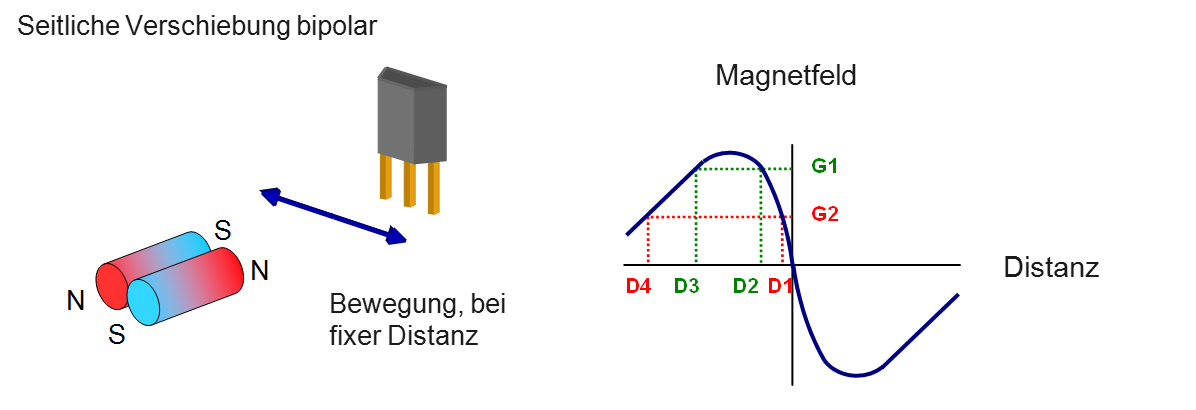
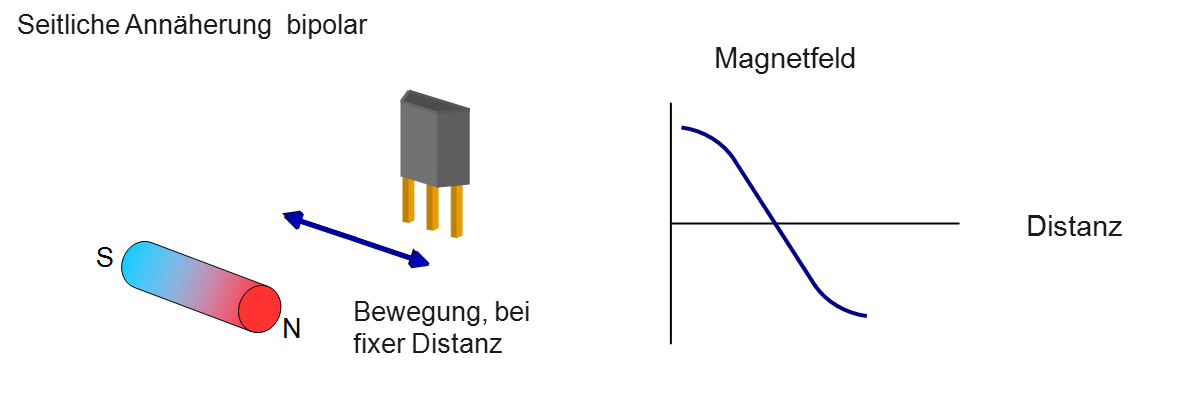
Analoge Sensoren (Wegmessung)
Bei der ersten dargestellten Anordnung handelt es sich um die seitliche Annäherung. Zwischen Magnet und Sensor wird ein enger, fester Abstand eingehalten. Wird der Stabmagnet bei festem Abstand hin und her bewegt, so erfährt der Sensor bei sich näherndem Nordpol ein negativ wachsendes Magnetfeld und bei sich näherndem Südpol ein positives. Diese Annäherungsart ist leicht aufzubauen und ermöglicht, bei Verwendung eines entsprechend langen Magneten, die Positionserfassung über lange Wegstrecken. Die Ausgangskennlinie dieser Wegmessungsanordnung ist die linearste aller gezeigten Anordnungen, vor allem wenn an beiden Magnetenden ein Polstück angebracht wird. Die günstige Kennlinie erfordert jedoch die strenge Einhaltung des Luftspalts zwischen Sensor und Magnet.
Einige Anwenderbeispiele: